
Conjunto de torso y brazos para robots humanoides
Es un conjunto de torso y brazos con características antropomórficas adaptable a un robot humanoide que comprende: un primer módulo conformado por un eje central o torso; un segundo módulo conformado por al menos un brazo, preferiblemente dos brazos, de los cuales, uno es el brazo derecho y el otro es el brazo izquierdo, encontrándose cada uno de ellos articuladamente unido a cada uno de los extremos del primer módulo o torso; un tercer módulo o cuello centralmente localizado en el extremo superior del torso, el cual permite el montaje de un cuarto módulo o cabeza en el que se pueden disponer cámaras, micrófonos u cualesquiera otros instrumentos que requieren tener una disposición distanciada respecto al conjunto a fin de tener perspectiva; y, una base que soporta a todo el conjunto de torso y brazos.
El diseño del torso y brazos trae consigo facilidades en robótica de servicio, ya que su configuración y calibración es trivial y, a la vez, muy flexible; dentro de sus cualidades se permite extender tres capacidades de la fisonomía humana: i) extensión de la altura del torso; ii) clavículas desarticulables; y iii) la posibilidad de hiperflexión/rotación negativa.
Es de fácil integración a un sistema robótico, ya que cualquier movimiento de un brazo es automáticamente compensado por el movimiento contrario del otro, lo cual no permite que el centro de gravedad cambie de posición durante la manipulación.
La presente invención provee un conjunto de torso y brazos como auxiliar en la fabricación de un robot social (sistema físico, computacional y electromecánico, integrado al entorno social (dinámico y complejo), presenta un comportamiento reactivo dirigido al cumplimiento de objetivos definidos y al de los usuarios, con características antropomórficas cuyas cualidades le permiten adaptarse a un robot humanoide proporcionándole un movimiento con una gran extensión y que al mismo tiempo no ocupe mucho volumen.
Permite manipular objetos que están muy distantes a su centro de gravedad, lo cual facilita e independiza la manipulación de la navegación; asimismo, provee el sistema de torso y brazos para robots humanoides cuya principal característica es la configuración humanoide y la capacidad para integrarse en bases robóticas comerciales (abarcando los sistemas móviles o fijos).
Las principales aplicaciones son las siguientes: educación y entretenimiento; investigación y exploración espacial; asistencia personal y cuidados; búsqueda y rescate y relaciones públicas.
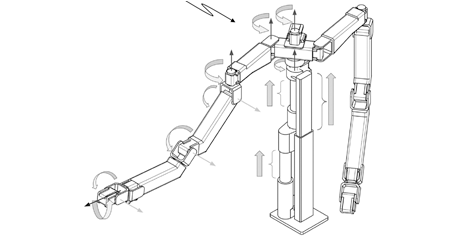
Vista esquemática del conjunto de torso y brazos.
Explora mas tecnologías en diferentes sectores:

CIENCIAS DE LA VIDA Y DE LA SALUD

INGENIERÍA

SUSTENTABILIDAD
Si te interesa alguna de estas tecnologías o no encontraste lo que buscabas
en la UNAM podemos ayudarte

